What is optimization?
The optimization of transportation is based on a mathematical model of the so called vehicle routing problem. The main goal is to decide which orders are transported in which vehicles, and setting the vehicles on best routes. The model is solved by dedicated optimization algorithms, which have been an academic research area for decades. Recently, algorithms have gotten good enough and computers fast enough for being able to intelligently assist human dispatchers and planners.
Tools
Optimization is usually used as a part of a larger transportation management system (TMS). With optimization, TMS are able to offer better scheduling and routing, while decreasing driving times and distances. To produce these results, the optimization runs algorithms that search for the best outcome while considering the constraints present on the problem. These constraints include time windows, capacities, stopping times and task compatibility.
Type of planning
Optimization is usually used in planning before the vehicles are dispatched, perhaps on the day before. This type of planning is also frequently used to evaluate strategies of differing approaches by using distinct scenarios, such as opening a new terminal or using existing ones.
Optimisation also helps planning in fast changing environments where the tools offer flexible re-planning. This type of continuous or dynamic planning is often used when, for example, receiving new orders or finding out that one of your vehicles broke down on the road.
Both planning before the vehicles start their tours and continuous planning during the course of the day are supported by our service.
A full access to the REST API for direct interfacing from other systems is documented within our developer web site.
Technical overview
The NFleet optimization service solves the vehicle routing problem by using metaheuristic global and local search algorithms. The computation considers
– pickups and deliveries at arbitrary locations,
– distribution or collection from one or multiple depots,
– planning multiple trips for vehicles,
– time windows for both pickups and deliveries,
– multiple capacity constraints (for example weight, number of pallets,
and volume),
– vehicle compatibility with tasks,
– vehicle costs,
– work and driving time restrictions, and
– properties of the road network (for example one-way streets and turning
restrictions in crossings) and speed limitations.
Computation
The computation has been demonstrated to provide good results with real-life problems containing up to 100 vehicles and 2000 tasks. The computation time varies greatly with the complexity of the computation (number of constraints, etc.), but typical smaller optimization runs currently take 3-5 minutes.
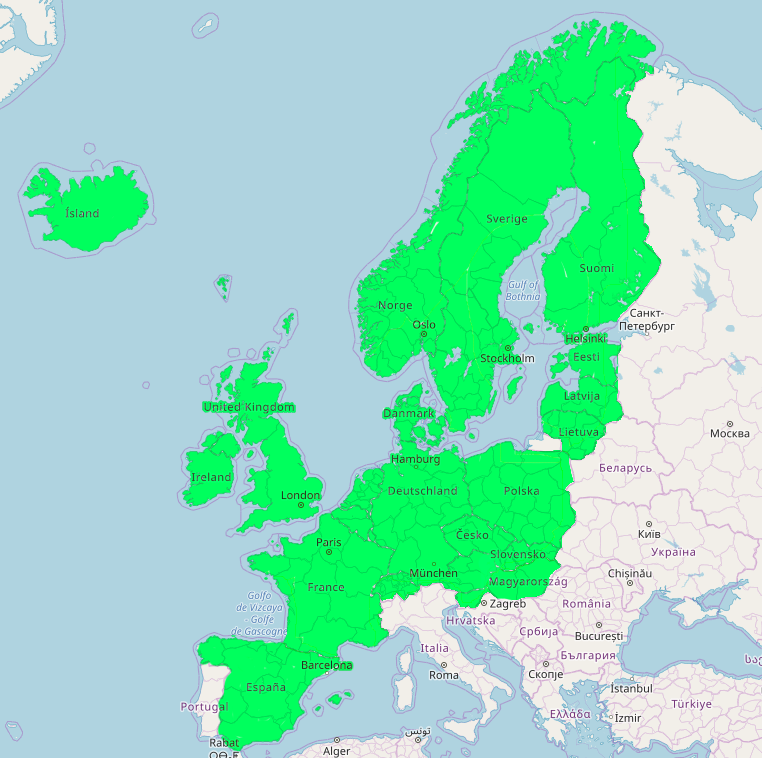
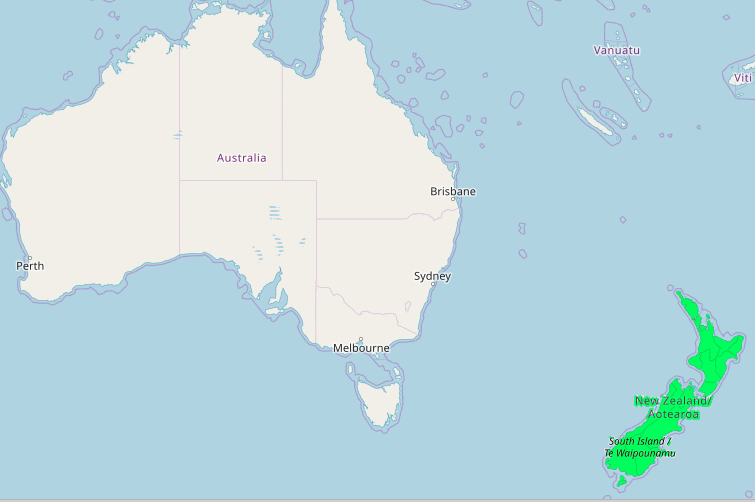
Road data
The road data is based on OpenStreetMap and currently supports planning in many countries, see the maps below. New countires will be supported as requested. The service API accepts the location data as coordinates or as addresses.
Infrastructure
The computation server infrastructure is provided by Microsoft Azure.